
Dr. Strandjord Research LAB
The ATLAS Lab’s mission is to develop tools to improve position, navigation, and timing (PNT) using Global Navigation Satellite System (GNSS) technology in addition to other signals of opportunity (SOP). We are part of the Department of Aerospace Engineering in the College of Science and Engineering at the University of Minnesota.


Beyond the Constellation
The Global Positioning System has been useful for on-board navigation purposes for space-based applications, particularly for low Earth orbit (LEO) satellites. However, there is interest in the ability to use a GPS receiver on-board a high Earth orbit (HEO) satellite. In contrast to LEO satellite navigation, one difficulty in determining the position of a HEO satellite is the poor instantaneous geometry of the HEO receiver relative to the visible satellites in the GPS constellation.

With our work in both DPE and mapping, we will be developing an interesting research project addressing the weak GPS signals paired with creating maps from orbital imagery to help with navigation and positioning in this environment.

Data Collection Campaigns

Ground Vehicle
An urban experiment was performed by driving an equipped vehicle with antennae and receivers to receive both GPS and LTE signals and GNSS+INS system to use as a ground truth.

Aerial Vehicle
To capture the real-world scenarios encountered by UAM transit a set of comprehensive experiments will be designed to provide relevant datasets. The experiments will be designed to replicate the environment a UAM would experience in the setting of the urban environment.
Investigating Signals of Opportunity

Signals-of-opportunity (SOP) to navigate in urban areas are being increasingly researched. For example, cellular long-term evolution (LTE) signals are abundant in cities for communication purposes

Using the DLOS visibility predictions, an interacting multiple model filter (IMM) that uses extended Kalman filters (EKFs) was implemented and executed in a simulation of the urban environment while incorporating the DLOS visibility predictions to determine the accuracy of locating the LTE small cell locations.
Situational Awareness
& Collective Detection
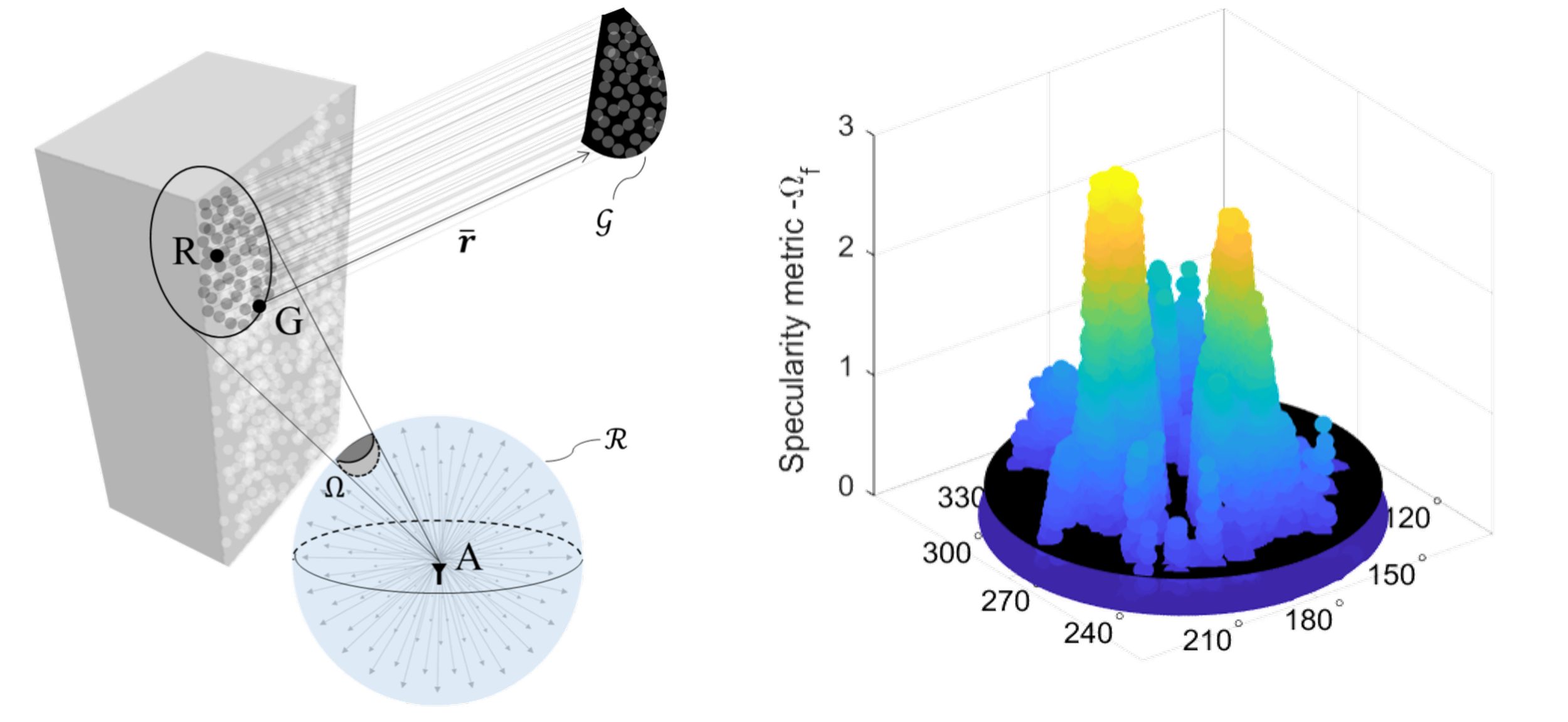
Situational awareness is implemented by predicting visibility and signal reflections throughout the environment by using techniques like Shadow Matching and Specular Matching

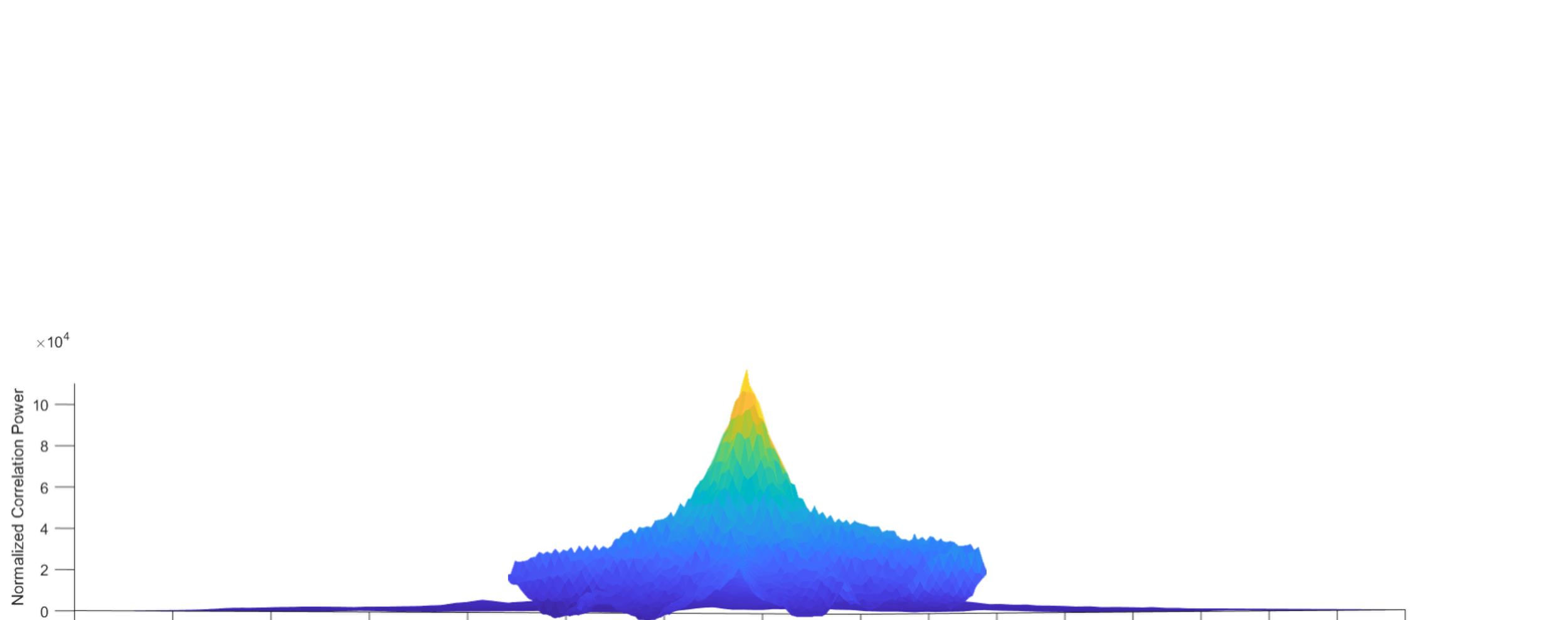
Acquisition peaks (left) and 2D map (right) of DPE incorporating situational awareness
Direct Positioning Estimation (DPE) or Collective Detection is used to perform coordinated acquisition using a priori information about the GPS satellites, some idea of user location, clocks, and surrounding environment.
Navigating the Urban Canyon

In dense urban canyons, GPS signals are blocked, reflected, and refracted, and a conventional GPS receiver may not be able to acquire or maintain lock on a satellite.
Our research focuses on modeling these environments to incorporate information and methods not typically used for positioning.

